

Entrega n°2: Control digital y robótica
- SCARA

- 27 sept 2019
- 1 Min. de lectura
Actualizado: 28 sept 2019
Para esta entrega tuvimos listo la implementación de las trayectorias suaves, interfaz de usuario a través de coordenadas articulares y coordenadas cartesianas (TCI) y la función HOME.
Prueba inicial HOME
Resultados simulación diseño de controladores








Indices de error de los controladores diseñados

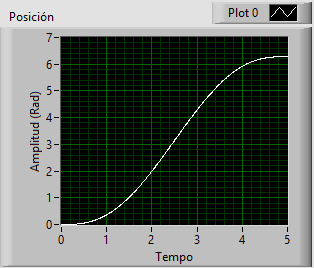
Resultados implementación trayectorias suaves
Para comprobar el funcionamiento de las trayectorias se simuló una posición final de 6.2832 rad (360 grados) en un tiempo de 5 segundos, con una posición inicial de 0 (cero) y velocidad y aceleración inicial y final igual a cero.





Interfaz de usuario




Link informe robótica:
https://www.overleaf.com/read/yjrdjsdqhhrx
Link informe control dígital:
https://www.overleaf.com/read/vdjhgywwdmcx


Comentarios